arduino load cell 로드셀
arduino load cell 로드셀
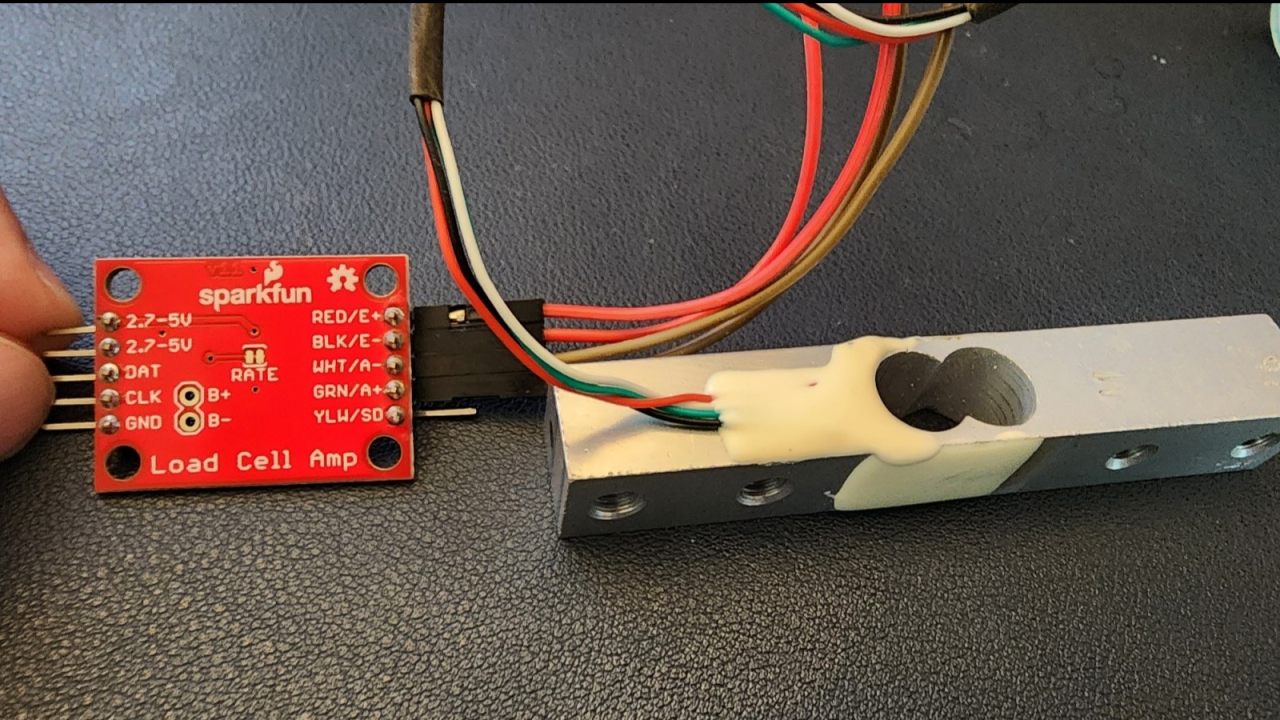
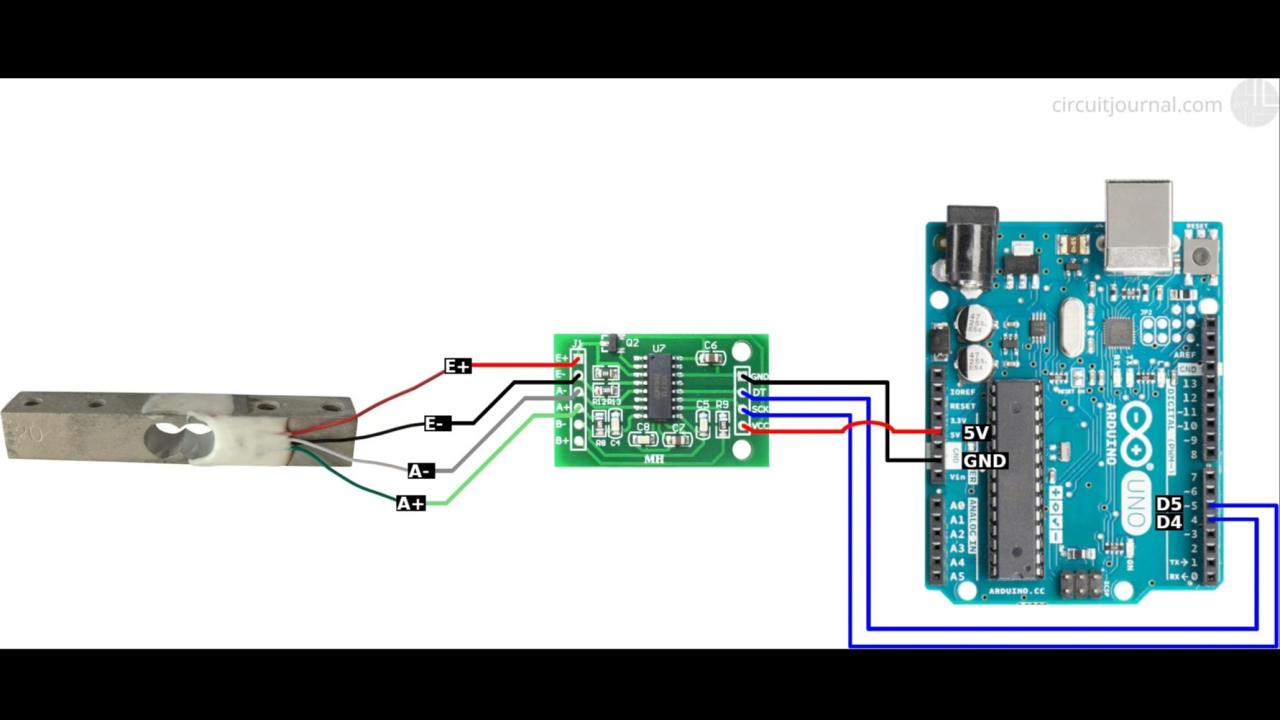
| Load cell | HX711 | 명칭 |
| RED | E+ | 전원+ |
| BLK | E- | 전원- |
| WHT | A- | 신호- |
| GRN | A+ | 신호+ |
| YLW | SD | 차폐 와이어(shield) |
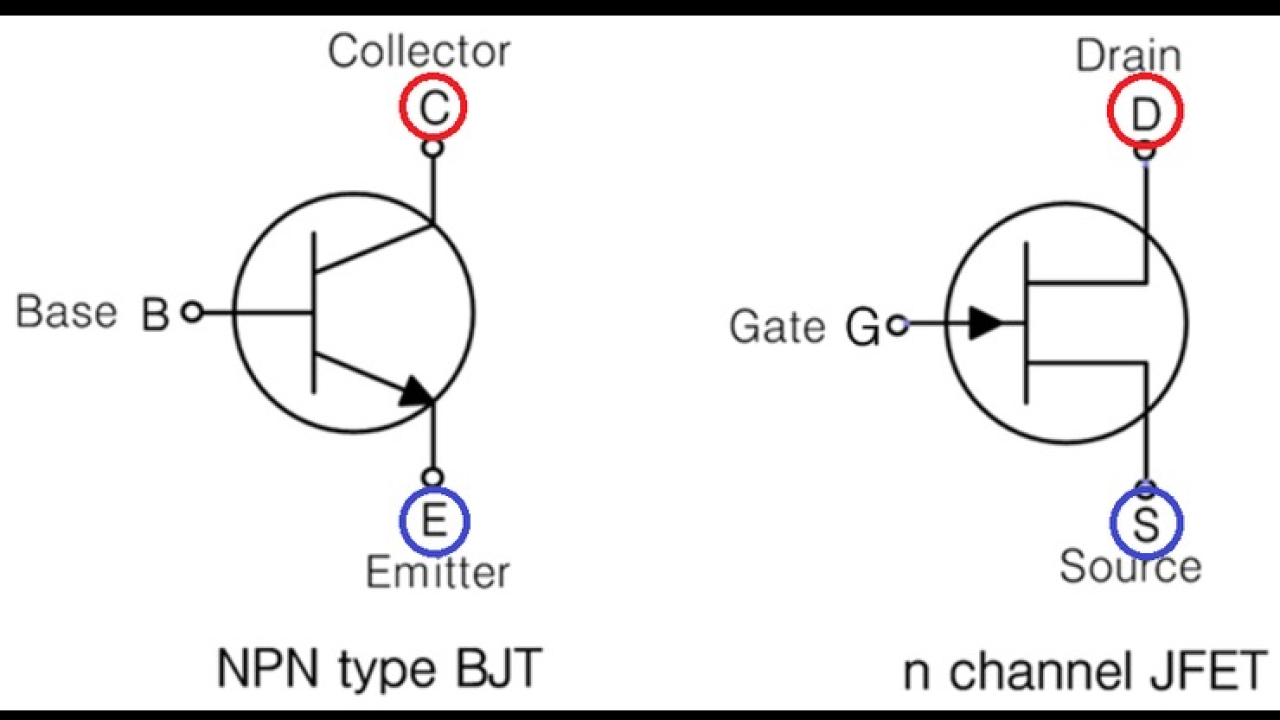
- Vcc : collector
- Vdd : drain
- Vee : emitter
- Vss : source
| Load cell | arduino | 명칭 |
| GND | GND | 전원- |
| DAT | D4 | 데이터 |
| CLK | D5 | 클럭 |
| VCC | 5V | 전원+ |
| VDD | 5V | 전원+ |
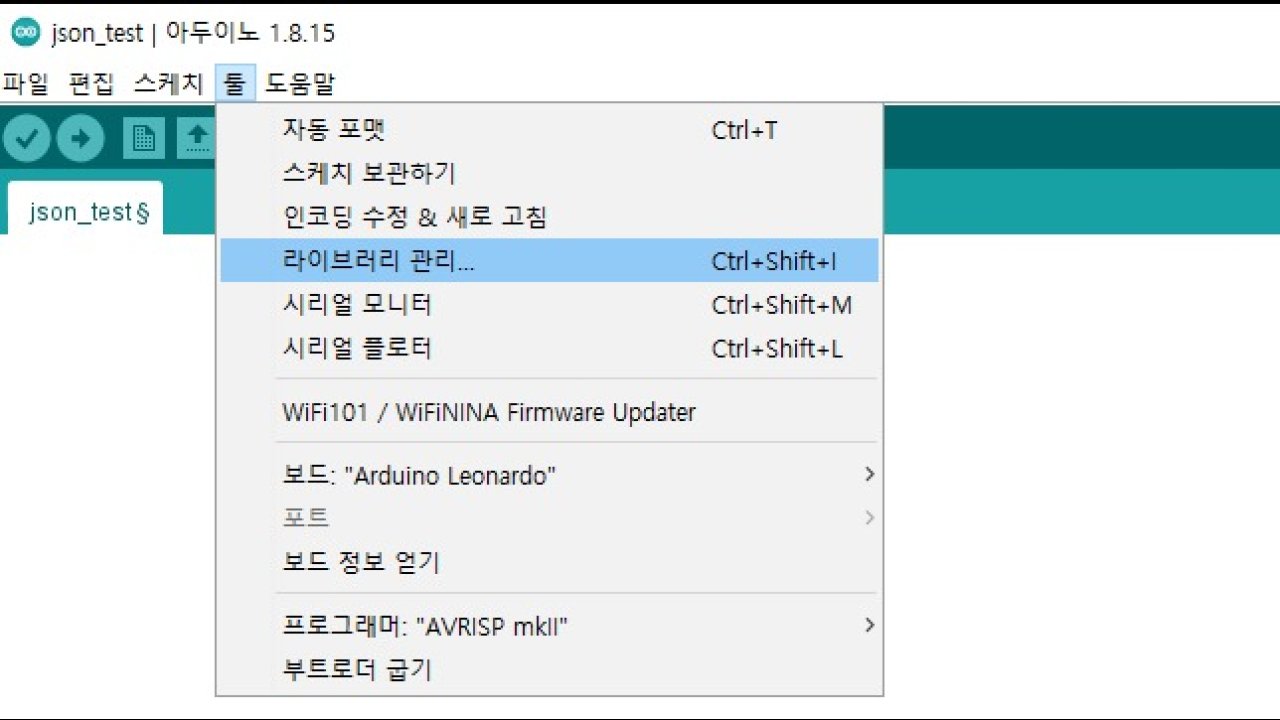
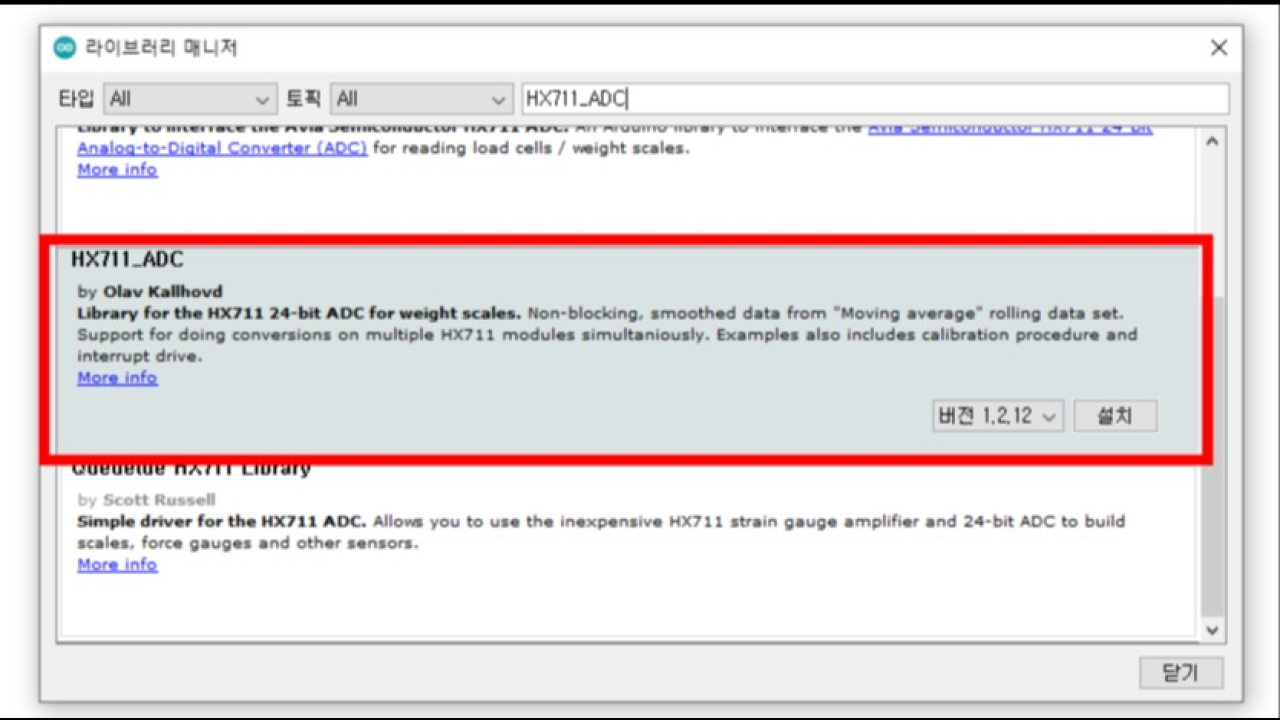
- https://github.com/olkal/HX711_ADC
- File->Examples->HX711_ADC->Calibration
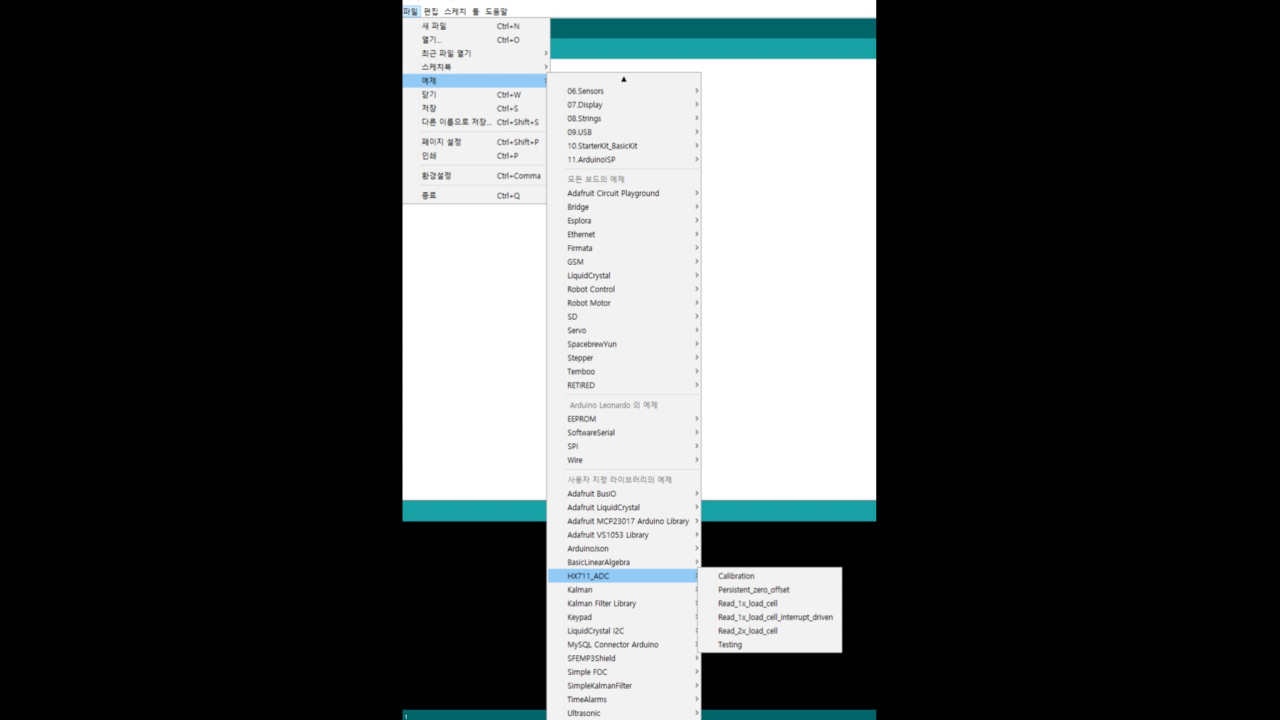
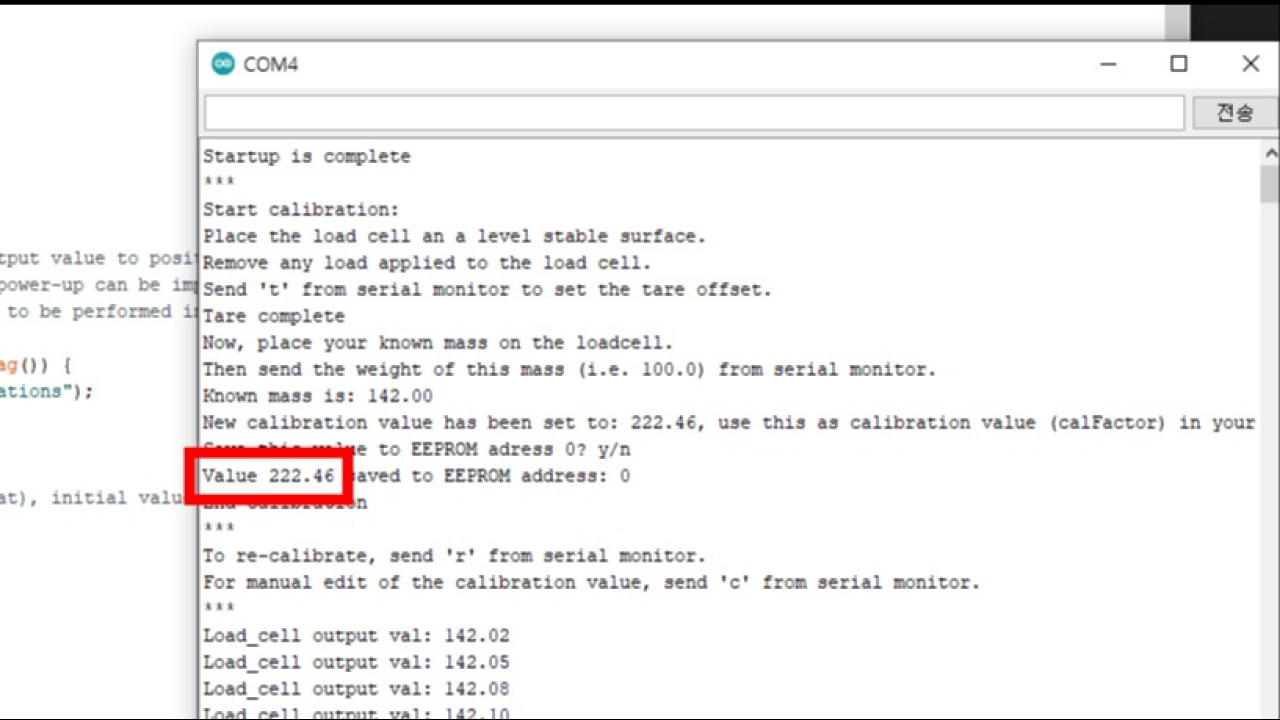
- 시리얼 모니터에 T를 입력하여 켈리브레이션 시작
- 무게를 알수 있는 물체를 준비하여 로드셀 위에 얹고 무게를 입력
- Y를 입력하여 EEPROM에 켈리브레이션 값 기록
- 켈리브레이션을 마치고 나면 켈리브레이션 값을 얻을 수 있음
#include <HX711_ADC.h>
#if defined(ESP8266)|| defined(ESP32) || defined(AVR)
#include <EEPROM.h>
#endif
#define HX711_dout 4 //HX711 데이터핀
#define HX711_sck 5 //HX711 클럭핀
//HX711 constructor:
HX711_ADC LoadCell(HX711_dout, HX711_sck);
const int calVal_eepromAdress = 0;
unsigned long t = 0;
void setup() {
Serial.begin(57600); delay(10);
Serial.println();
Serial.println("Starting...");
float calibrationValue; // calibration value
calibrationValue = 222.46; //직접값을 입력 (EEPROM데이터가 있다면 덮어씌어짐)
#if defined(ESP8266) || defined(ESP32)
EEPROM.begin(512);
#endif
EEPROM.get(calVal_eepromAdress, calibrationValue);
//캘리브레이션 데이터가 있다면 EEPROM에서 가져옴.
LoadCell.begin();
//LoadCell.setReverseOutput();
unsigned long stabilizingtime = 2000; //용기무게 측정 정밀도 향상을 위한안정화시간
boolean _tare = true; //용기무게 측정이 필요치 않으면 false
LoadCell.start(stabilizingtime, _tare);
if (LoadCell.getTareTimeoutFlag()) {
Serial.println("Timeout, check MCU>HX711 wiring and pin designations");
}
else {
LoadCell.setCalFactor(calibrationValue); // set calibration factor (float)
Serial.println("Startup is complete");
}
while (!LoadCell.update());
Serial.print("Calibration value: ");
Serial.println(LoadCell.getCalFactor());
Serial.print("HX711 measured conversion time ms: ");
Serial.println(LoadCell.getConversionTime());
Serial.print("HX711 measured sampling rate HZ: ");
Serial.println(LoadCell.getSPS());
Serial.print("HX711 measured settlingtime ms: ");
Serial.println(LoadCell.getSettlingTime());
Serial.println("Note that the settling time may increase significantly if you use delay() in your sketch!");
if (LoadCell.getSPS() < 7) {
Serial.println("!!Sampling rate is lower than specification, check MCU>HX711 wiring and pin designations");
}
else if (LoadCell.getSPS() > 100) {
Serial.println("!!Sampling rate is higher than specification, check MCU>HX711 wiring and pin designations");
}
//자체적으로 켈리브레이션을하고 센서 상태를 확인함
}
void loop() {
static boolean newDataReady = 0;
const int serialPrintInterval = 500; //increase value to slow down serial print activity
// check for new data/start next conversion:
if (LoadCell.update()) newDataReady = true;
// get smoothed value from the dataset:
if (newDataReady) {
if (millis() > t + serialPrintInterval) {
float i = LoadCell.getData();
Serial.print("Load_cell output val: ");
Serial.println(i);
newDataReady = 0;
t = millis();
}
}
if(i > 5000){ //로드셀로 부터 입력된 값이 5000그람(5KG)보다 크다면
//모터정지
}else{
//모터회전
}
// receive command from serial terminal, send 't' to initiate tare operation:
if (Serial.available() > 0) {
char inByte = Serial.read();
if (inByte == 't') LoadCell.tareNoDelay();
}
// check if last tare operation is complete:
if (LoadCell.getTareStatus() == true) {
Serial.println("Tare complete");
}
}