project arduino 9axis 아두이노 9축센서 연동
project arduino 9axis 아두이노 9축센서 연동
프로젝트 관련링크
프로젝트 기록
- arduino esp32 : 기존 디바이스 프로그램 라이브러리 버전 기록
- 디바이스 협조 요청 : 기존 디바이스 개선 요청사항
- arduino esp32 기존소스 분석 : 디바이스 재개발로 인한 기록
- unity version 유니티 버전공유 : 유니티를 개발하기 위한 버전공유
- xiaoesp32c3 보드문제
기능 요약
- arduino lcd simple code 아두이노 액정 디스플레이 요약
- arduino BLE bluetooth simple code 아두이노 저전력 블루투스 요약
- arduino mpu6050 simple code 아두이노 6축 회전센서 요약
void setup(){
pinMode(A0, INPUT); // ADC
}
uint32_t Vbatt = 0;
void loop(){
Vbatt = 0;
for(int i = 0; i < 16; i++) {
Vbatt = Vbatt + analogReadMilliVolts(A0); // ADC with correction
}
float Vbattf = 2 * Vbatt / 16 / 1000.0; // attenuation ratio 1/2, mV --> V
}
- 4.1볼트 : 전원연결 스위치 오프
- 3.3볼트 : 전원연결 스위치 온
- 2.9볼트 : 전원제거
- 2.7볼트 (2분) : 블루투스 끊김
-
2.6볼트 (2분 40초) : LCD 화면 깜빡임
제작
- esp32, lcd, mpu6050, ble bluetooth, source code 종합 소스코드
- unity esp32, lcd, mpu6050, ble bluetooth, source code 종합 소스코드
2024-07-19 중간보고
개선 전
개선 후
- 센서 켈리브레이션 작업은 추가로 필요합니다.
- 배터리 표시 및 LCD 화면 출력은 미구현입니다.
- 센서값을 Unity로 보내고 좌표를 계산하는 부분이 개선 되었습니다. (esp32 소스코드 전면 수정)
2024-08-07 파일전달
유니티 파일
- Unity project
- Unity Editor version : 2022.3.27f1
- 프로젝트를 안드로이드로 빌드하면 apk파일이 생성됩니다. 이 파일을 스마트 폰으로 옮겨서 실행하면됩니다.
아두이노 파일
아두이노 라이브러리
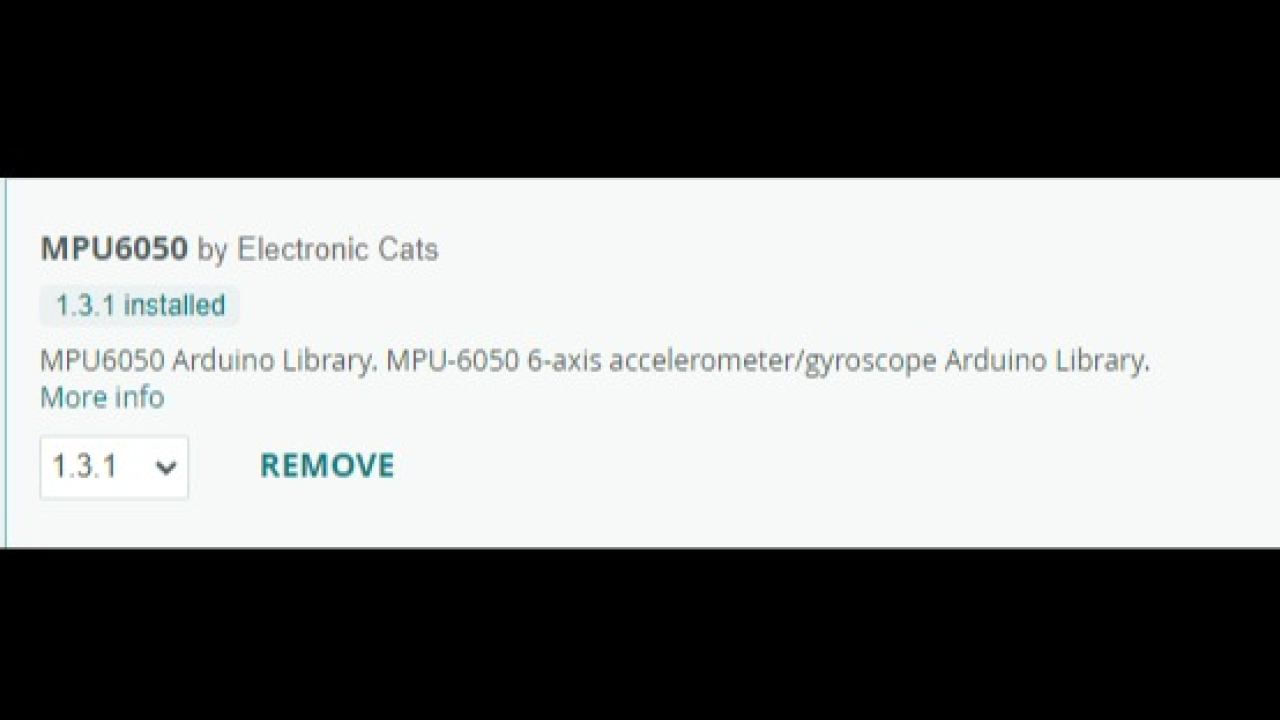
- MPU6050 by Electronic Cats 라이브러리를 설치 합니다.
- 버전 1.3.1
아두이노 설치 방법
- 아두이노 라이브러리를 다운 받습니다.
- mpu6050 캘리브레이션 파일을 다운로드 받습니다.
- 아두이노에 업로드 합니다.
- 기기를 수평으로 하고 시리얼 모니터에 엔터를 입력하면 켈리브레이션을 시작합니다. (수초에서 수분 소요될 수 있습니다.)
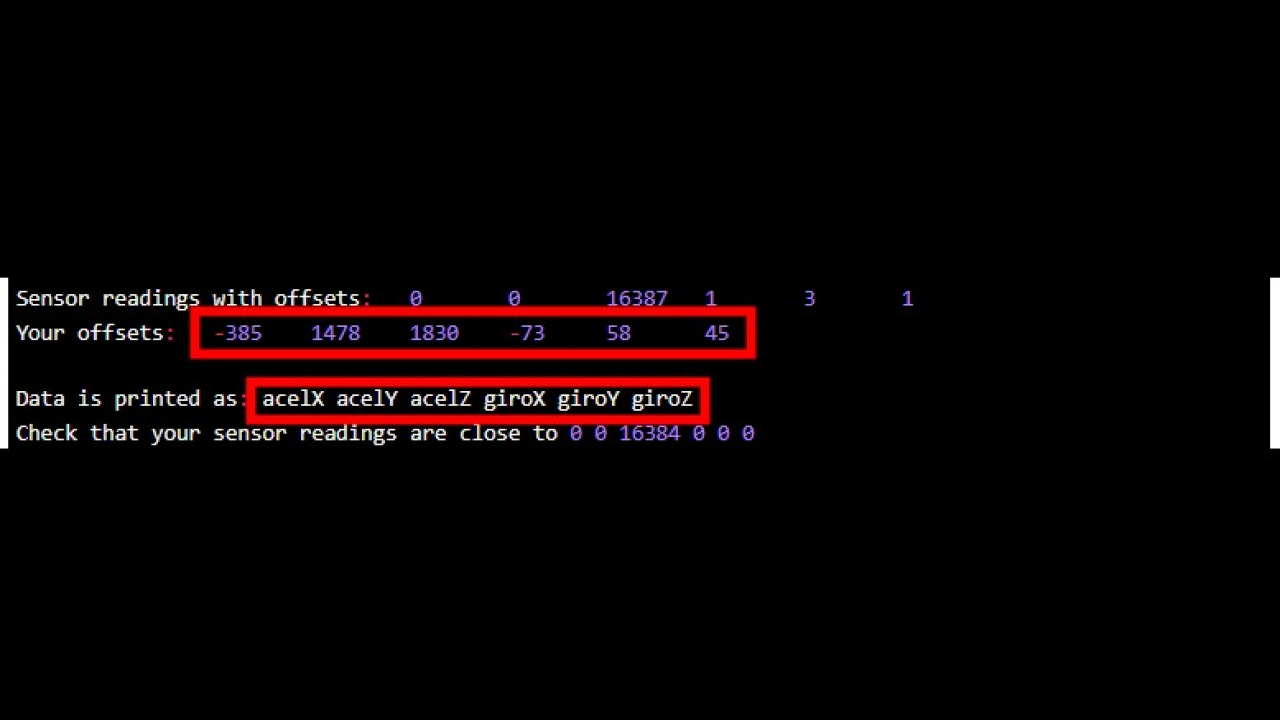
-
캘리브레이션을 마치고 얻을수 있는 값의 각각의 명칭을 확인합니다.
-
esp32 디바이스 소스코드에서 다음의 내용 찾아서 캘리브레이션 결과 값을 입력에 넣습니다.
mpu.setXAccelOffset(-481);
mpu.setYAccelOffset(1422);
mpu.setZAccelOffset(1807);
mpu.setXGyroOffset(-75);
mpu.setYGyroOffset(56);
mpu.setZGyroOffset(40);
- 아두이노에 업로드 합니다.